Abstract—
Road sign recognition is one of the important tasks of intelligent transportation systems (ITS). The project aims at implementation of road sign detection and control of an autonomous vehicle using Haar Cascade Classifier algorithm. In this proposed work, the system automatically detects the road signs, controls the vehicle and command certain actions. The system consists of Raspberry Pi 3 processor and web camera which automatically captures the video data and converts them into number of frames which are processed by the proposed algorithm in OpenCV to detect the road sign and control the vehicle. Based on the detected sign, the vehicle is controlled by two DC motors interfaced with Raspberry Pi. The experimental results for Peak Signal to Noise Ratio (PSNR) and Minimum Mean Square Error indicate the proposed system gives more accurate results with higher PSNR value compared to Hough Transformation .using python and image processing with machine learning
I. INTRODUCTION
Automatic Road sign detection and recognition is animperative errand of Advanced Driver Assistance Systems, has been of incredible enthusiasm for ongoing years for unmanned vehicles. It enhances safety by informing the drivers about the current state of traffic signs on the road and giving valuable information about precaution. Road signs are placed either at the sides of road or above as navigation guides. With continuous raise in road traffic, mishaps chances likewise raises. Road safety statistics demonstrate that about 1.24 million people die annually on road due to accidents. Thus, the research has focused in recent years on intelligent systems that can avoid the collisions and mishaps. They are developed to enhance Road safety and driving comfort. This system introduces a method of road detection using Raspberry Pi for self-driving car. When vehicles are moving on the road, it is difficult to find road sign such as lane, crosswalk, stop line, turn left, turn right etc., only using a single camera. A web camera mounted on the moving prototype vehicle captures the image and processes the image using Haar Cascade Classifier. Several image of road signs are collected, trained and stored as databases in the memory of the Raspberry pi. As signs are captured it is compared with the data bases and accordingly the prototype vehicle is navigated using DC motors automatically. Results are obtained using both Matlab and Open V installed in Raspberry Pi kit. Performance metrics such as PSNR, MMSE and execution time obtained for five images show that better accuracy is obtained if the algorithm is implemented
II. LITERATURE REVIEW
Amol Jayant Kale and R.C.Mahajan[1] have proposed a methodology for street sign acknowledgment framework which getting the traffic sign image from the moving vehicle. In this paper the framework gets separated into two phases. The primary stage is utilized as an identification part which recognizes the street sign coordinated with the database and second part is arrangement organize that is to characterize the distinguished signs which is taken from the principal arrange. Every one of the image are put away in database. In the identification arrange, the info picture taken is a YCBCR shading space distinguishes the street signs by utilizing shape
separating technique. At last the arrangement module decides the scene pictures which is identified by utilizing an Artificial Neural Network (ANN). The recreation appeared in this
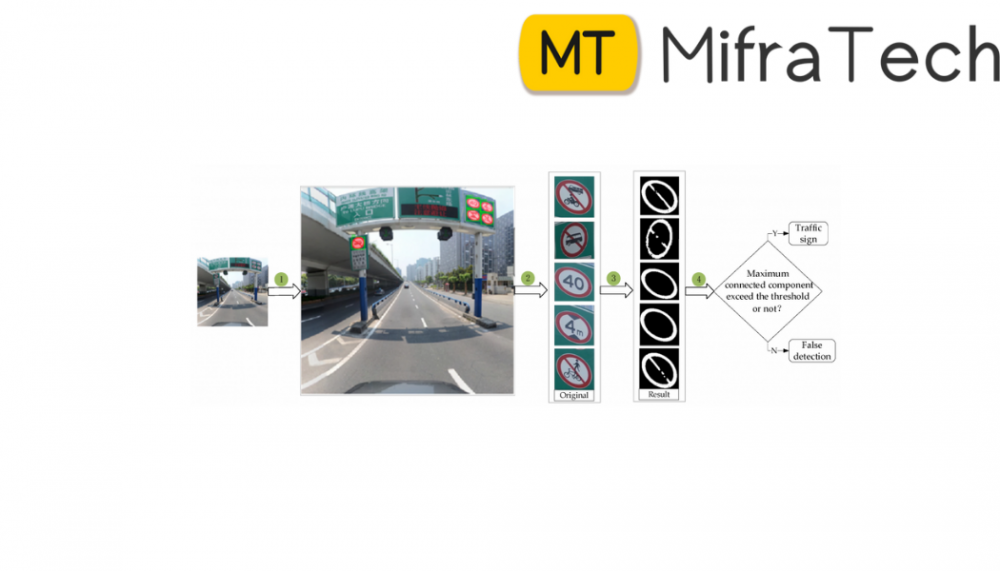
framework creates a steady extraction of scene image for the location of the signal. Filatov et al[2] have proposed a methodology for discovery and acknowledgment of traffic signs explicitly planned for brightening and separation changes. In this paper, the framework utilizes a single board PC Raspberry Pi 2 and web camera 150 for playing out the proposed method. A algorithm
for deciding the traffic sign area utilizes shading channel with morphological administrators and canny edge indicator. The identification of image type depends on multilayer perceptron neural system. The framework takes five image database to prepare and test a calculation. The created framework gives vigorous to light changes and impacts. It can identify street signs around 20 cm in breadth from 1.5– 2 m separate. The hindrance of this system is that the achieved exactness and processing speed of the planned operation are less when handled with neural system. Ayoub Ellahyani and Mohamed El Ansari[3] have proposed a framework with vehicle mounted cameras to distinguish street signs while vehicle driving out and about. The frameworks essential capacity is to educate the driver of caught street signs that may missed because of diversion or inattentiveness. In this work, a strategy for street sign discovery and acknowledgment is found. This strategy is isolated into three phases, the initial, a color segmentation technique is utilized to separate the ROI of scene image. At that point, the image is alluded to polygonal estimation procedure to recognize triangular, circular and rectangular shapes. The last stage utilizes SVM classifier to perceiving the recognized signs taken from planned component. This methodology was tried on two openly accessible datasets. The kernel models in classifier are very delicate to over-fitting the model foundation selection and furthermore restrains in speed and size.
Hardware and software required
· Raspberry Pi p3
· Pi camera
· Sd card 16 gb
· 5 volt power
· Model car
Software
· Python
· Image processing
· Machine learning
Engineering project on embedded system
Latest engineering topic in electronics and communication engineering
Project ideas and explanation on project
Top 100+ iot projects
Best electronics projects
Projects centre in vijayanagara
Best engineering projects
Computer science with machine learning projects