Air Powered Mini Wall Climbing Robot Project
Abstract -
Robots are quickly moving from industrial domain to service field. The design and development of robot depends on the application for which it is intended for. This paper discusses the design of pneumatic suction mechanism based vertical surface climbing robot. This robot is suitable for inspection of concrete walls, accessing of underside of bridges, reactor pressure vessel inspection, cleaning tall buildings, and many such applications where the robot must be autonomously functioning. Suction cup mechanism has superior performance due to greater gripping capability which ensures more payload and task specific tool carriage. Typical adhesion force and payload calculations are also discussed in this paper. Key Words: Suction mechanism, Double acting cylinder, Solenoid valves
1. INTRODUCTION
Robotics is one of the fascinating technologies, which has world wide applications. There are many different reasons for using a robot but the central reason for most applications is to eliminate a human operator. They can work longer than humans and do the task repeatedly without fatigue.Potential application are quite numerous and may vary from replacing human in repetitive or heavy task or work in unsafe and/or contaminated sites. Wall climbing robots are intended for motion on vertical and sloping surfaces in complex and extreme conditions. These robots have the potential to provide revolutionary steps in doing dangerous tasks that are usually performed by humans. Wall-climbing robots are helpful systems for various applications on vertical surfaces. There are a variety of potential applications of robotics for climbing operations that increase efficiency and safety. These include inspection of concrete walls, to access of underside of bridges, reactor pressure vessel inspectionand cleaning tall buildings which are difficult to be performed by humans. Recently, there have been many demands for automatic cleaning system on outside surface of buildings such as window glass by increasing of modern architectures. Some customized window cleaning machines have already been installed into the practical use in the field of building maintenance. However, almost of them are mounted on the building from the beginning and they need very expensive initial and maintenance cost. Therefore, requirements for small, light weight and portable window cleaning robot are also growing in the field of building maintenance. The prospect of climbing robots is coveted because they can take the place of humans to carry out hazardous and maintenance job such as cleaning glass surfaces of skyscrapers, fire rescue, and inspectionof high pipes and wall, cleaning and inspection of high rise buildings, evaluation and diagnosis of a storage tank in nuclear power plants and petrochemical facilities, maintenance of ship, aluminum aircraft wing inspection with the consideration of operational efficiency, safety and human health. Due to the ability to relieve human beings from these hazardous works, more and more people are interested in developing various service climbing robots in recent years. Based on a classification of different types of climbing machines examples of robots are presented, which are typically developed for industrial and commercial use. Considering the application environment the system requirements of climbing robots will be presented. A climbing robot used for the inspection of concrete bridges is presented as an example with a huge commercial potential [1], [2]. The robot carries on board sensors which are used for inspection of the nuclear power plants where human are restricted [3]. For micro-scale application the size of the robot scaled down. The macro-scale robot is also used in space for repair, cleaning, inspection and surveillance [4]. The robot has to adapt to unevenness surface of motion which payload to be carried on porous and rough surfaces [5]. The most common attachment principle is the vacuum adhesion, where the robot carries an onboard pump to create a vacuum inside the cups, which are pressed against the wall. This system enables the robots to adhere on any type of material, with low energy consumption. But vacuum adhesion is suitable for usage on smooth surfaces, because the roughness can lead to a leakage in the vacuum chamber such as suction cup. The force in the normal direction when a suction cup adheres to surfaces is measured and compared for dry and respectively wet conditions [6]. Due togravitational force the stress distribution deform the suction cups. The robot can incline in dangerous angle which the safety of robot matters [7]. Electrostatic wall adhesion is an attractive method if the robot is to climb smooth surfaces such as glass or door. Akio Yamamoto et al. have designed and developed a wall climbing mechanism based on electrostatic attraction. The electrostatic attraction was generated by flexible electrodes of plastic film and conductive foil [8]. Tomoaki Yano et al. have discussed semi self contained wall climbing robot which uses scanning type suction cups. They have tested the designed robot on the walls, steps cracks and gaps. This design is somewhat similar to the design presented in this paper, except that we use pneumatic cylinder/piston driven arrangement for movement [9].
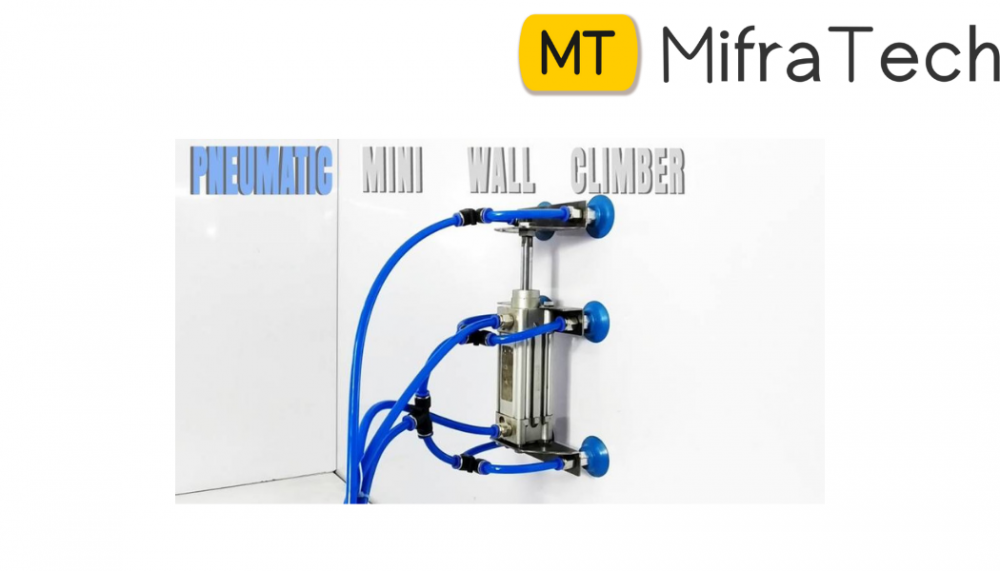
The climbing robot comprises of two limbs. Each limb has 4 suction cups. The suction cups are used to stick on to the surfaces. The air removal from suction cups is completed using a vacuum pump, controlled by solenoid valves.
A microcontroller is used to control the relays that in turn switch electricity to solenoid valves. Suction pipes are used to connect solenoid vales to suction cups. We here use pneumatic power so as to develop a wise wall-climbing robot. The robot makes use of pneumatic power for movement additionally as suction so as to clutch the wall.
The system may be a sensible mixture of pneumatic, mechanical and electronic circuitry that allows achieving this task. The robotic system consists of two pneumatic pistons so as to realize the movement. We make use of valves and drive them electronically so as to achieve the required movement. Also, we make use of suction cups at the end rods in order to achieve Vaccum based suction.
We use vacuum ejector pistons and drive them through valves to operate the vacuum-based system parallel to the pneumatic systems in coordination in order to achieve the desired mechanism. As a result of the coordinated movements of those systems, we tend to get a totally operated pneumatic based mostly wall-climbing robot.
Components:
· Pneumatic Cylinder
· Pneumatic Piping
· Pipe Joints and Fittings
· Valves
· Suction Cups
· Vacuum Pump
· Guide Rods
· Bearings
· Base Frame
· Supporting Frame
· Mounts and Joints
· Screws and Nuts
Advantages:
· Building Window Cleaning
· Climbing Steep Walls
· Easy to Operate
· Low Power Consumption
Disadvantages:
· Requires Compressed Air Supply
Block Diagram:
Side View

3D Views

. CONCLUSIONS
Based on the requirements of an application several prototype robots exist which show the huge application potential of these kinds of machines. The inspection of the big concrete walls which is frequently necessary by law for stacks, bridges or dams etc. is the application area for our climbing robot. The climbing principle and the inspection subsystem were successfully tested. With respect to the locomotive and adhesion mechanisms, which are necessary requirements for climbing, climbing robots are classified into six and five groups, respectively. The main applications are: corrosion control using color cameras, welding joints inspection using X-ray sensors, rivet or screws joints, Lasers, etc. The mobility of this type of climbing robots is not yet defined and there are only a few robots of this type. They are, at the same time, a big social need and there is a big market for them. This paper has also discussed the method of estimating adhesion force and pay loads which are important issues for any wall climbing robot.
We are providing best quality on projects with good services. We are giving free internship on project, Projects Based on IOT, Agriculture, Robotics, Pneumatics and Hydraulics, Aeronautical
Mifratech websites : https://www.mifratech.com/public/
Mifratech facebook : https://www.facebook.com/mifratech.lab
Mifratech instagram : https://www.instagram.com/mifratech/
Mifratech twitter account : https://twitter.com/mifratech
Contact for more information : [email protected] / 080-73744810 / 9972364704
IEEE PROJECTS | ECE best projects bangalore, CSE engineering projects ,
2128, Srinidhi complex, 3rd floor,16th B cross,
Bus stand road, near mother dairy cross, Yelahanka new town
BANGALORE, Karnataka 560064
mechanical final year projects
mechanical engineering final year projects on automobile
mechanical engineering final year projects on thermal
mechanical engineering final year projects on agriculture
buy mechanical final year projects
mechanical engineering final year projects pdf
mechanical final year design project
mechanical engineering final year project ppt
m.tech mechanical final year projects
agriculture based mechanical engineering final year projects
final year projects for mechanical engineering related to automobile
mechanical engineering final year project analysis
mechanical final year project buy
best mechanical final year projects
final year mechanical projects done by iit students
buy final year projects for mechanical engineering
b.tech final year projects for mechanical engineering